今年は、平昌オリンピックやサッカーワールドカップなどスポーツの年になりそうですね。
寒さの折いかがお過ごしでしょうか、おおみや(む)です。
今日はリバースフットリグを作ってみようと思います。
私はあまりリバースフットを好まないのですが、人によってはリバースフットの
粘りけのあるオペレーションを好む人もいます。
どちらも大事ということで、私のリグの上に下駄を履かせるような感じの
即席でエコなリバースフットリグをご紹介しようと思います。
以前、紹介したリグ。
同様の足のリグ。
ポールベクター、足のIK制御兼くるぶしの回転リグ、指先回転リグの簡素なものです。
これに下駄を履かせます。
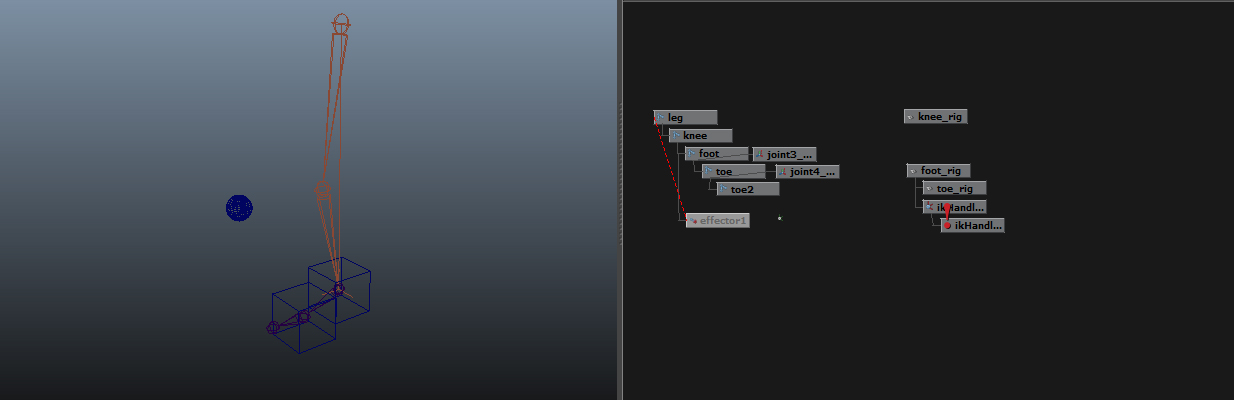
1.toe2ジョイントの位置にrv_foot_rig(ロケーター)、toeジョイントの位置にrv_toe_rig(ロケーター)を回転を合わせて配置し、
2.rv_toe_rigをrv_foot_rigの子供にします。
これで下駄の準備完了。
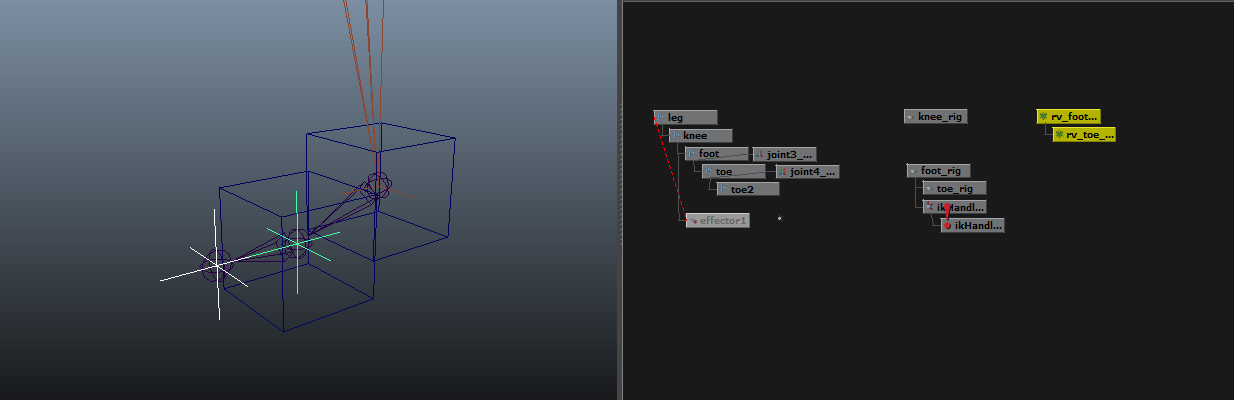
3.rv_foot_rigを主にして、foot_rigにoffsetアリでペアレントコンストレイン。
4.toe_rigのローテートにそれぞれ、エクスプレッションを入れます。
rotateXのエクスプレッションへ
toe_rig.rotateX = rv_toe_rig.rotateX *-1;
rotateYのエクスプレッションへ
toe_rig.rotateY = rv_toe_rig.rotateY *-1;
rotateZのエクスプレッションへ
toe_rig.rotateZ = rv_toe_rig.rotateZ *-1;
ハイパーグラフはこんな感じになります。
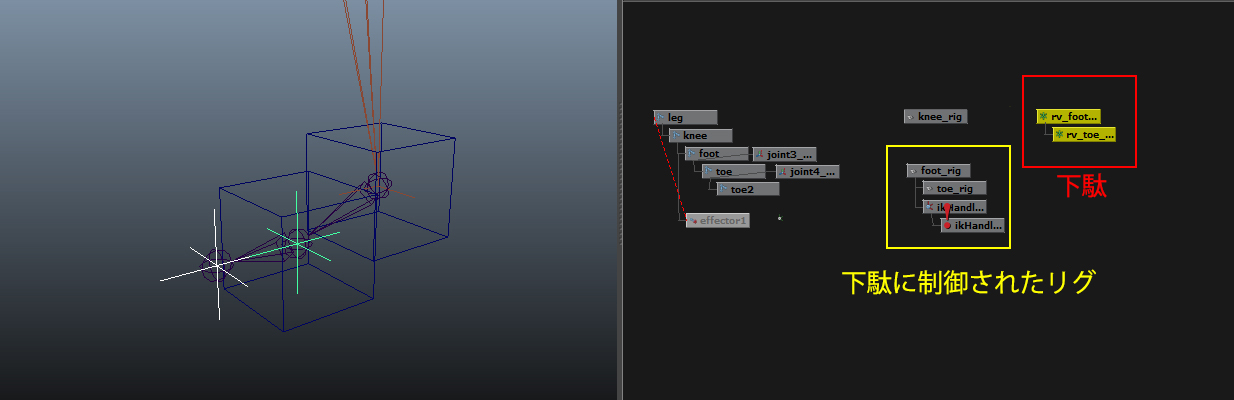
完成です。
パントマイムのクリックやフィックスポイント、メカニズムを知っていれば、リバースフットが
無くとも接地感のある動きは良い感じに作れたりしますが、それはまたの機会に。
それではまた。